|
|
|
|
Primer1 PWM analysis and CAN! V1.0
|
|
 |
|
Measures the frequency and the PWM ratio. Project Primer1 PWM analysis without Circle OS
+CAN
+Display
+More Fronts
+Images
+background image
+extern interrupt |
| Code size: | |
Author: | Matthias |
| Source files included: | yes |
Version: | V1.0 |
| Use circleOS: | no |
Creation date: | 2010-04-26 12:41:04 |
| Hardware modification: | yes |
Modification date: | 2010-04-26 13:16:19 |
| Based on the STM32 Primer: | Primer1 |
| |
| |
|
| Downloads: | 2416 |
Views: | 30969 |
| |
|
| Vote: |
|
Average ratings: | 0/5 (0 rates) |
Download:
Primer1-PWM-analysis-and-CAN-V1.0.zip (1209 KB)  Description:
Description:/********************* (C) COPYRIGHT RAISONANCE S.A.S. *********************************/
/********************* (C) COPYRIGHT STMicroelectronics ********************************/
/********************* (C) Matthias ****************************************************/
/* optimized for PRIMER1, extended and amended by Matthias email webmaster@tg-info.de
Project "Primer1 PWM analysis"
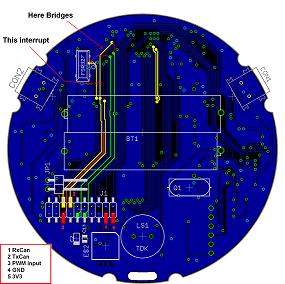
!! Hardware change !!
There must be two interruptions tracks and two new connections are soldered.
The Can driver is connected the external.
see: "_Hardware_change\Primer_bot.png"
What goes
- LEds
- CAN
- Vbat
- Temp sensor
- Shutdown
- 3 axis acceleration sensor
- Backlight ON/Off
- Display
- More fronts generate with "Primer_Fonts_V1.1.xls"
- Background image Background image is "Pictures/bmp_background_image.h" generate with "Create_background_image.xls"
- Symbols images with Transparent generate with "Create_BMP_header.xls"
/* ------------------------------------------------------------------------------------*/
/* Functions and Variable Description */
/* ------------------------------------------------------------------------------------*/
/* ------------ AccelSensor.c ------------------------------------------------------------- */
extern void AccelSensor_Init_Sensor(void); // needs to be started once
extern void AccelSensor_Read_Sensor(void); // After the call the following variables are set
extern s16 AccelSensor_X_Roh_s16; // Accel Sensor X unfiltered
extern s16 AccelSensor_Y_Roh_s16; // Accel Sensor Y unfiltered
extern s16 AccelSensor_Z_Roh_s16; // Accel Sensor Z unfiltered
extern s16 AccelSensor_X_Fil_s16; // Accel Sensor X filtered
extern s16 AccelSensor_Y_Fil_s16; // Accel Sensor Y filtered
extern s16 AccelSensor_Z_Fil_s16; // Accel Sensor Z filtered
/* ------------ BackLight.c --------------------------------------------------------------- */
extern void BackLight_On(void); // turn on the LCD backlight
extern void BackLight_Off(void); // turn off the LCD backlight
/* ------------ Buzzer.c --------------------------------------------------------------- */
enum BUZZER_mode
{
BUZZER_UNDEF = -1, /*!< undefined mode for buzzer */
BUZZER_OFF = 0, /*!< The buzzer is put off. */
BUZZER_ON = 1, /*!< The buzzer is put on. */
BUZZER_SHORTBEEP = 2, /*!< Make buzzer to bip for a short time */
BUZZER_LONGBEEP = 3, /*!< Make buzzer to bip for a long time */
BUZZER_PLAYMUSIC = 4 /*!< Make buzzer to play a music */
};
extern void Buzzer_Handler(void);
extern void Buzzer_SetMode( enum BUZZER_mode mode );
extern void Buzzer_PlayMusic (const u8 *melody );
/* ------------ CAN.c --------------------------------------------------------------------- */
extern void USB_LP_CAN1_RX0_IRQHandler(void); // Interrupt when message is received can
extern void CAN_Send_Msg_401(void); // sample
/* ------------ CAN_Debug.c --------------------------------------------------------------- */
extern void CAN_Debug_Send_All_Primer_Data(void); // Sends several can messages with the sensors values
/* ------------ Configuration.c ----------------------------------------------------------- */
extern void Configuration_RCC(void); // The name says it all
extern void Configuration_GPIO(void); // The name says it all
extern void Configuration_NVIC(void); // The name says it all
extern void Configuration_SysTick(void); // The name says it all
extern void Configuration_ADC(void); // The name says it all
extern void Configuration_SPI(void); // The name says it all
extern void Configuration_CAN(void); // The name says it all
extern void Configuration_Timer(void); // The name says it all
/* ------------ EXTI0_IRQHandler.c -------------------------------------------------------- */
extern void EXTI2_IRQHandler(void); // Interrupt on EXTI0
extern u16 EXTI2_Cycle_Time_Count_u16; // interrupt counter
extern u16 EXTI2_High__Time_Count_u16; // interrupt counter
extern u16 EXTI2_Counter_u32; // interrupt counter
/* ------------ Font.c -------------------------------------------------------------------- */
extern void Font_Set_Font_u8( u8 Font ); // to change the font
#define Font_7x8 1 // available fonts
#define Font_7x11 2 // available fonts
#define Font_10x16 3 // available fonts
#define Font_16x16 4 // available fonts
#define Font_Symbols 5 // available fonts
#define Font_BigNumber 6 // available fonts
#define Font_Primer 0 // available fonts
extern u8 Font_Width_u08; // Font width of the selected font
extern u8 Font_Height_u08; // Font height of the selected font
extern u8 Font_Starts_u08; // first sign of the selected font
extern u8 Font_Ends_u08; // last character of the selected font
extern u8 Font_Scale_u08; // Scale of the selected font
extern bool Font_Transparent_Bol; // if true, the background image is not overwritten. Background image is "Pictures/bmp_background_image.h generate" with "Create_background_image.xls"
extern u16 Font_Text_Color_u16; // Text color of the selected font
extern u16 Font_BGnd_Color_u16; // Background color of the selected font
extern u8* Font_Character_Table_P08; // pointer on the current font
/* ------------ Lcd.c --------------------------------------------------------------------- */
extern void LCD_Init(void); // needs to be started once
extern void LCD_Draw_Surface ( u8 x , u8 y , u8 width, u8 height, u16 color ); // drawing surface
extern void LCD_Draw_Rectangle ( u8 x , u8 y , u8 width, u8 height, u16 color ); // drawing rectangle
extern void LCD_Draw_Line ( u8 x1, u8 y1, u8 x2 , u8 y2 , u16 color ); // Draw line
extern void LCD_Delite_Line ( u8 x1, u8 y1, u8 x2 , u8 y2 ); // restore delete line painted against the background image
extern void LCD_Draw_BW_Image ( u8 x , u8 y , u8 width, u8 height, const u8* imageptr ); // draw black and white picture
extern void LCD_Draw_Color_Image( u8 x , u8 y , u8 width, u8 height, const u16* imageptr ); // Draw color image
extern void LCD_Write_Text ( u8 x , u8 y , const u8* Text, u8 Text_Len ); // Write text, textsetup see Font.c
extern void LCD_background_image( void ); // see folder "_Background_image"
extern void LCD_DisplayRotate ( u8 Pos );
/* ------------ Led.c --------------------------------------------------------------------- */
extern void Led_Set_Value_u8(u8 Value); // Bit 0 is green, Bit 1 is red
extern void Led_Green_On(void); // The name says it all
extern void Led_Green_Off(void); // The name says it all
extern void Led_Red_On(void); // The name says it all
extern void Led_Red_Off(void); // The name says it all
extern void Led_Green_and_Red_On(void); // The name says it all
extern void Led_Green_and_Red_Off(void); // The name says it all
/* ------------ Main.c -------------------------------------------------------------------- */
extern bool Main_System_Init_Finished_Bol; // Once all configuration is done it is set to true
extern RCC_ClocksTypeDef RCC_Clocks;
extern void Pause_80us(void);
extern void Pause_01us(void);
/* ------------ Pushbutton.c -------------------------------------------------------------- */
extern void Pushbutton_Read(void); // After the call the following variables are set
extern u8 Pushbutton_Push_Counter_u08; // press in the variable increased by one, so that the press time can be evaluated (max 250)
/* ------------ Shutdown.c ---------------------------------------------------------------- */
extern void Shutdown_Me(void); // After the call, the primer off
/* ------------ Task.c -------------------------------------------------------------------- */
extern void Task_delay_ms(volatile uint32_t nTime); // ms delay function
/* ------------ TempSensor.c -------------------------------------------------------------- */
extern void TempSensor_Read_Sensor(void); // After the call the following variables are set
extern s16 TempSensor_Value_Fil_s16; // Temperature filter 100 corresponds to 10 degrees
extern s16 TempSensor_Value_Roh_s16; // Temperature unfiltered
extern u16 TempSensor_Value_Spg_u16; // Voltage sensor unfiltered
/* ------------ Vbat.c -------------------------------------------------------------------- */
extern void Vbat_Read_Vbat(void); // After the call the following variables are set
extern u16 Vbat_mV_Fil_u16; // Vbatt filtered
extern u16 Vbat_mV_Roh_u16; // Vbatt unfiltered
extern u16 Vbat_Charging_mVoltage_Fil_u16; // Charging Voltage filtered
extern u16 Vbat_Charging_mVoltage_Roh_u16; // Charging Voltage unfiltered
|
|
|
|
|